Probably one of the shorter design focused posts I'll do. I'm going to be talking about the cooling system.
I
RUN
HOT
Fact and case in point. I've always had a hot metabolism. I grew up in one of the more 'miserable' climates of Europe and you know what, it suited me just fine. But the hot, sunny, humid, and even arid places I've been to since then have made me appreciate the power and wonder of central air. I'm particularly sensitive to the heat. I'm prone to dehydration, both from my own damn fault (not drinking enough) and my metabolism (I loose a lot of water sweating imperceptibly and perceptibly). I've had heat exhaustion several times in my life, and probably heat stroke in some of those cases.
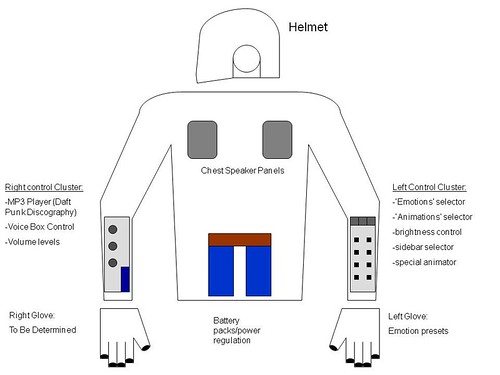
So you can imagine, the last thing I want to do is wear an enclosed helmet with maybe 50W of heat generating equipment built into it, while wearing full leathers. Throw that into the high energy atmosphere and attention of a convention and I probably won't last 15 minutes. I need something more than just good hydration. Once again days of google research ensued.
Plenty of options are out there, and I found scenarios for plush encased mascots, to Storm Troopers, to renaissance fair armor. It all fits into two main categories: evaporative cooling, and phase change cooling.

Evaporative cooling is basically augmenting our bodies normal means of cooling itself: sweating and letting the sweat evaporate. Despite what lower school science told you those decades ago, water will evaporate at less than 100deg C. It depends on the air temperature and humidity level, but evaporation below 100deg C does happen. As that water evaporates, to help it reach that gas state, the water will suck in as much of the surrounding heat energy that it can to help it along. And that's how it cools you. If you don't believe me, it's kept you alive up until this point.
Evaporative cooling systems normally work by wearing a fabric that will hold a lot of moisture without feeling particularly 'wet.' Slowly, that stored water will evaporate to the surroundings and take some heat energy with it, cooling the fabric and you. However, as anyone who's lived in a swampy area will tell you, it doesn't work very well when humidity is high. This is because the air is already saturated with water, so there isn't anywhere for evaporating water to go. So evaporative cooling works great in the desert, but that's about it.

The other system is phase change. It sounds more complicated than it really is. Phase change, when talking about personal cooling, really amounts to ice melting. As ice changes from solid cubes/blocks/chips to water, that process absorbs heat energy. But another aspect of phase change cooling is that, typically, you start with ice below the freezing point. So first, your ice warms up to the transition temperature, in this case 0deg C. Then it starts melting, absorbing more energy. But now, you still have 0deg C water. That cold water actually takes more energy to heat 1deg C than the ice does. Because of these three stages of heating, ice water can in fact absorb a lot of energy.
The commercially available phase change cooling clothing normally amounts to nothing more complicated than ice packs sewn into clothing. Some have replaceable ice packs, so you can wear one set, use it up, and change it out for another set. The problem is in fact these packs. Depending on the outside temperature, your level of activity, and so on, those packs will 'run out' and need to be replaced more often. You could end up needing a lot of ice packs for any reasonable (or unreasonable) length of costume wearing. And those cost money. And they ad a good bit of bulk to your person depending on their size.
Neither of these options are particularly ideal for the design and spirit of my project. But there is a third option. I'm not sure when in the days, weeks, and months of research this option turned up, but it did and it's what I'm going with.

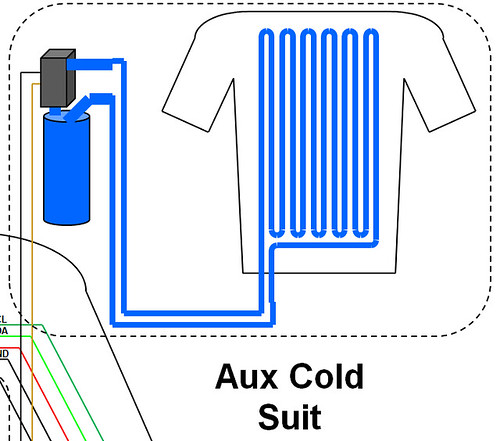
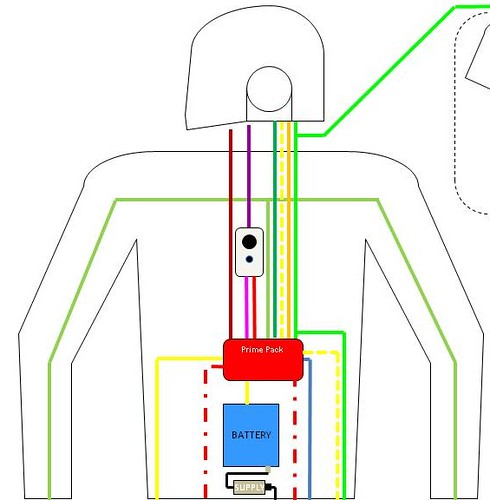
The system I've decided to go with is essentially a portable implementation of the type of cooling systems used for race drivers. These systems use circulating ice water from a reservoir, pumped around the core of the body via a shirt with small capillary tubing sewn into it.
I like this system for a couple of reasons. First, it has the level of complexity that I enjoy on this project. Anything simpler just wouldn't 'fit' as well with what I'm trying to accomplish. Second, it's fairly low profile, both size wise and the impact it will have with the other systems in the project. The shirt isn't much thicker than a normal shirt, and the reservoir can pretty much be any size. Third, it's essentially 'free' to operate for any length of time. If I use up the current batch of ice water, a trip to the ice machine, or even the bar, will provide the refill I need. All done without the need to for special ice packs. Forth, it's expandable and interchangeable, meaning I can use a number of different reservoirs depending on the situation. Fifth, I can run a 'thermostat' to cycle the pump on and off, improving the comfort and level of cooling depending on my activity, and potentially increasing the duration of a supply of ice water. As you can tell, I like this solution.
Guess that wasn't as short as I thought it would be...